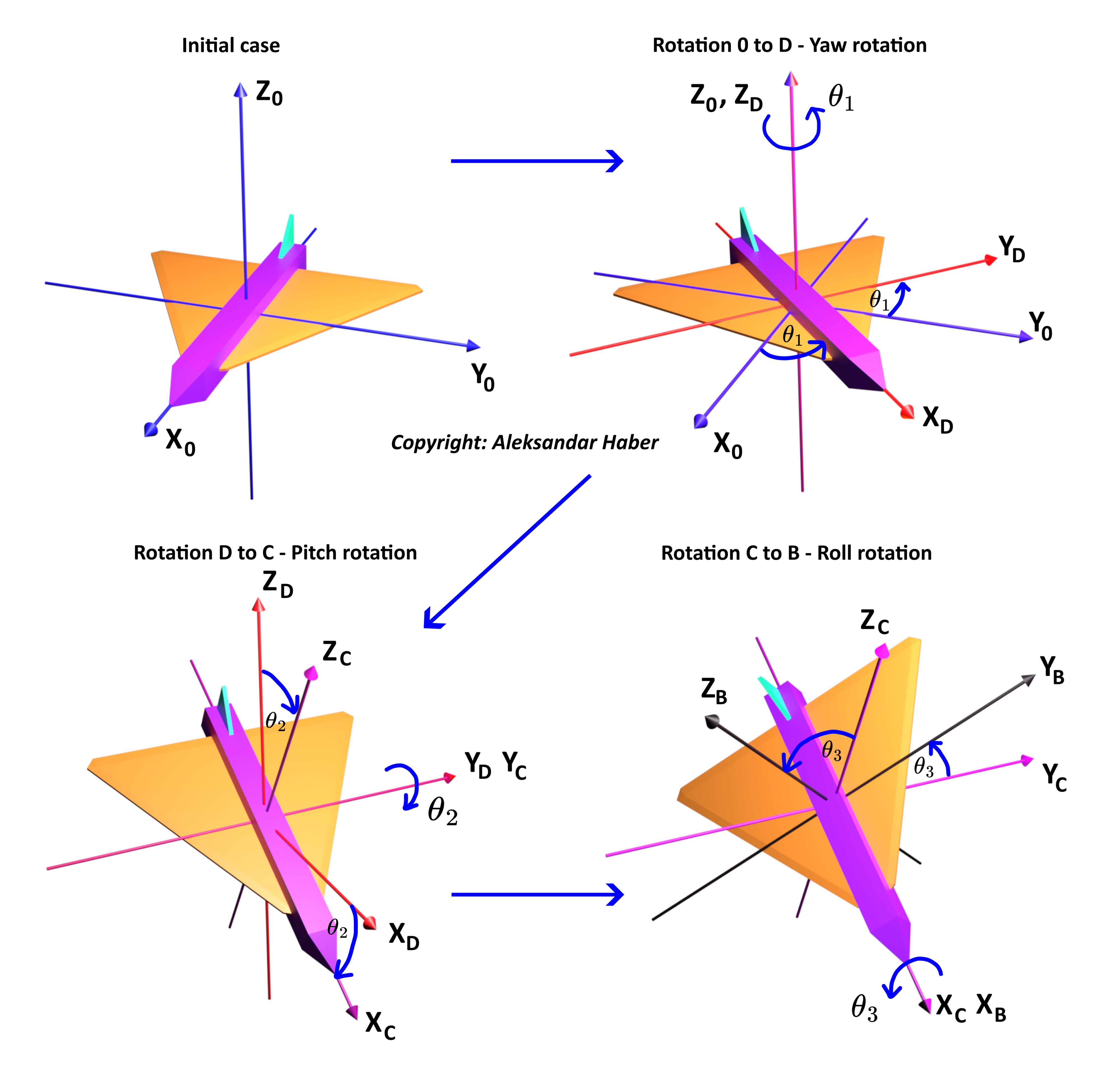
Combine Pitch And Roll. (1) yaw, (2) pitch and (3) roll. In its initial position, the aircraft coordinate system and the world coordinate system are. Below as a picture to illustrate the definition. Just like pure linear forces, these moment forces need to be considered when calculating bearing life or determining the suitability of a linear system to withstand static loads. combining pitch, yaw, and roll rotations is commonly used in computer graphics and animation, robotics, and. Pitch it to $ob$ and then roll it to. In a previous project i used a adxl345 accelerometer. There's actually a lot of ways. Start with a vertical line segment $oa$ of length $1$. roll, pitch, and yaw are rotational forces, or moments, about the x, y, and z axes. given an object with a rotation matrix, how do you calculate the pitch, yaw, and roll velocities that needs to be applied over. pitch, roll and yaw are defined as the rotation around x, y and z axis. roll pitch and yaw are common names for 3 angles used to describe orientation. say we have pitch $ = \alpha$ and roll $ = \beta$.
from aleksandarhaber.com
Pitch it to $ob$ and then roll it to. say we have pitch $ = \alpha$ and roll $ = \beta$. In its initial position, the aircraft coordinate system and the world coordinate system are. roll pitch and yaw are common names for 3 angles used to describe orientation. Below as a picture to illustrate the definition. roll, pitch, and yaw are rotational forces, or moments, about the x, y, and z axes. combining pitch, yaw, and roll rotations is commonly used in computer graphics and animation, robotics, and. pitch, roll and yaw are defined as the rotation around x, y and z axis. There's actually a lot of ways. Just like pure linear forces, these moment forces need to be considered when calculating bearing life or determining the suitability of a linear system to withstand static loads.
Clear Graphical and Mathematical Explanation of Yaw, Pitch and Roll
Combine Pitch And Roll In a previous project i used a adxl345 accelerometer. There's actually a lot of ways. Just like pure linear forces, these moment forces need to be considered when calculating bearing life or determining the suitability of a linear system to withstand static loads. roll, pitch, and yaw are rotational forces, or moments, about the x, y, and z axes. Pitch it to $ob$ and then roll it to. given an object with a rotation matrix, how do you calculate the pitch, yaw, and roll velocities that needs to be applied over. pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i used a adxl345 accelerometer. say we have pitch $ = \alpha$ and roll $ = \beta$. combining pitch, yaw, and roll rotations is commonly used in computer graphics and animation, robotics, and. (1) yaw, (2) pitch and (3) roll. Start with a vertical line segment $oa$ of length $1$. Below as a picture to illustrate the definition. In its initial position, the aircraft coordinate system and the world coordinate system are. roll pitch and yaw are common names for 3 angles used to describe orientation.